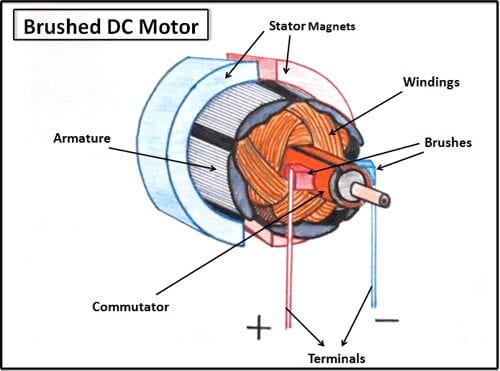
ชุดควบคุม DC Motor (Brush)
ชุดควบคุม DC Motor สร้างไม่ยากเท่าไรนัก โดยส่วนใหญ่จะนิยมกันคือ วงจรแบบ PWM (Plus width Modulation) วงจรลักษณะนี้จะดีกว่าวงจรควบคุมมอเตอร์แบบลิเนียร์ทั่วไป ตรงที่สูญเสียพลังงานต่ำ ความร้อนน้อย ทั้งนี้เนื่องจากการทำงานจะเป็นลักษณะพัลส์ คลื่นสี่เหลี่ยมดังรูป ปรับช่วง On-Off ได้ซึ่งเรียกว่า Duty Cycle เช่นถ้า Duty Cycle 100% สัญญาณช่วง Ton จะเป็นเส้นตรงเสมือนกับเราป้อนไฟให้มอเตอร์ตรงๆ นั่นเอง หากDuty Cycle ลดเหลือ 50% สัญญาณช่วง Ton จะเป็น 1/2 ของสัญญาณทั้งหมดใน 1 คาบเวลาส่งผลให้แรงดันออก 50% ของแหล่งจ่ายเป็นต้น การทำงานลักษณะนี้กำลังงานสูญเสียจึงน้อย เพราะภาค Output ไม่ต้องทำงานตลอดเวลา
ส่วนแตกต่างกันออกไป คือ
หากมอเตอร์มีกำลังวัตต์ที่สูงขึ้นส่วนภาค Power จะต้องใช้อุปกรณ์กำลังจำพวก Mosfet IGBT หรือ Transistor ที่มีกำลังสูงขึ้นหรือจะต่อขนานหลายตัวมากขึ้นเพื่อให้สามารถรองรับกระแส ตามที่มอเตอร์ต้องการได้ชุดควบคุมจะมี 2 ภาคการทำงานหลักๆ คือภาค Drive และภาค Power ดังที่กล่าวไปในเบื้องต้น ภาค Driver จะทำหน้าที่สร้างสัญญาณ PWMเพื่อส่งต่อไปยังภาค Power เพื่อขับเคลื่อนมอเตอร์อีกทีหนึ่ง
ภาค Driver ที่เห็นๆ กันอยู่มักใช้
– Opamp เพื่อกำเนิดสัญญาณฟันเลื่อย และใช้ Opamp อีกตัวมาทำการ Compare แรงดันกันเพื่อให้ได้ สัญญาณ PWM
– IC PWM สำเร็จรูป วิธีนี้ค่อนข้างสะดวกและง่าย อุปกรณ์น้อยดีครับ
– ไมโครคอลโทรลเลอร์ แบบนี้ค่อนข้างจะพิเศษมาก เนื่องจากต้องมีการเขียนโปรแกรมเพื่อใส่เข้าไปอาจจะเป็นภาษา Assembly หรือภาษาซี การใช้ IC ไมโครคอลโทรลเลอร์มาทำ PWM นี้นิยมไปทางแนวทำหุ่นยนต์ หรือการควบคุมมอเตอร์แบบเฉพาะทางที่ต้องการ ควบคุมแบบมีเงื่อนไขหลายๆอย่าง
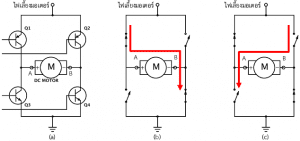
ภาค Power
ส่วนที่ต่อกับมอเตอร์และรับแรงดันไฟหลักโดยตรง เพื่อขับเคลื่อนมอเตอร์ให้ทำงานได้ ภาคนี้เองอาจจะมีการต่อชุด Feedback กลับไปยังภาคคอลโทรลเพื่อสามารถควบคุมการทำงานให้เสถียรขึ้นได้ ส่วนใหญ่ภาคนี้จะใช้ Power Mosfet เนื่องจากไม่ต้องการกระแสจากภาค Driver สูงซึ่งต่างจาก Transistor ที่ต้องการกระแสเพื่อขับเบสที่มากทีเดียว ความร้อนก็สูงตามมาด้วยเช่นกัน
ภาค Driver
IC เบอร์ MC33033 เป็นไอซีสำเร็จรูปถูกออกแบบมาเพื่อใช้งานกับมอเตอร์ไม่ใช้แปรงถ่าน (Brushless DC Motor) หรือ ที่เราเรียกกันว่า HubMotor การใช้งานหลักๆ ก็ดู DataSheet ก็จะเข้าใจดียิ่งขึ้นครับ หากกล่าวโดยสรุป
- ขา 4,5,6 เป็นขา Hall Sensor Encoder เข้า (สายเส้นเล็ก สีเหลือง เขียว และน้ำเงิน ที่ตัวมอเตอร์นั่นล่ะ)
- ขา 2,1,20 เป็นขาขับเกทชุด” บน” ของภาค Power Output
- ขา 15,16,17 เป็นขาขับเกทชุด “ล่าง” ของภาค Power Output
- ขา 9 เป็นขาต่อกับคั่นเร่ง
- ขา 14 เป็นไฟบวก 30V
- ขา 13 เป็นกราวด์
- ขา 13,18 เป็น Option (เดินหน้า/ถอยหลัง,เลือก Phase Encoder)
- ขา 19 เป็น Output Enable Active Low ต้องต่อลงกราวด์
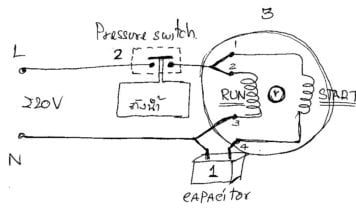
เนื่องจากแรงดันจากไอซี MC33033 ไม่สามารถขับเกทเพาเวอร์มอสเฟตทั้ง 6 ตัวได้ จึงต้องใช้ IC TLP250 ทำหน้าที่ขับขาเกทของเพาว์เวอร์มอสเฟท ทั้งหมดจำนวน 6 ตัวอย่างดังรูปด้านล่าง (ต้องสร้างวงจร IC TLP250 จำนวน 6 ชุดเพื่อขับเกททของเพาว์เวอร์มอสเฟท แต่ละตัวคือ Bottom Drive 3 ตัวและ Top Drive 3 ตัว
มอเตอร์ชนิดนี้ได้มีการนำมาใช้กับ ประตูอัตโนมัติ ในหลายๆ รุ่น ซึ่งถือว่ามอเตอร์ที่มีคุณภาพ และ เป็นอุปกรณ์หนึ่งที่ทำให้การทำงานของประตูอัตโนมัติมีประสิทธิภาพด้วย



{kind=link}